

FlappyBot – der neue Freiheitsgrad für Fiberplacement
Die Idee dahinter
Große, flächige Faserverbundstrukturen für Verkehrsflugzeuge werden aufgrund von Automatisierbarkeit und Prozessstabilität vorwiegend im Fiberplacement-Verfahren hergestellt. Ein typischer Anwendungsfall sind die Flügelschalen.
Der Aufbau des Systems
Der Ansatz frei verfahrbarer, mobiler Einheiten wird seit einer Prämierung durch den DLR-Idea-Award verfolgt. Die zentrale Herausforderung des Verfahrens – dem Fahren auf dem Laminat ohne unzulässige Beschädigungen – wurde auf einem Prüfstand untersucht.
Anwendungen
Für Fiberplacement sind Portalsysteme und Knickarmroboter durch Legeleistung und Genauigkeit Benchmark. Solche Systeme sind durch ihren großen Umfang an Hardware und baulichen Voraussetzungen jedoch nur bedingt skalierbar. Das Projekt FlappyBot hat das Ziel, den Entwicklungsfortschritt der mobilen Robotik für Fiberplacement zugänglich zu machen.

Mehrere Einheiten kooperieren und verfahren ohne Führungskinematik

Fiberplacement durch autonome selbstfahrende Einheiten
Ansprechpartner:
Philipp Sämann M.Sc.
Integrated Positioning System
Die Idee dahinter
In der Industrie 4.0 modernisieren mobile Roboter maßgeblich Produktionsabläufe. Sie gestatten nicht nur einen hohen Autonomiegrad bei höherer Effizienz in routinierten Aufgaben, wie dem Transport von Bauteilen in Lagerhallen und dem Verbauen in Fertigungsstätten, sondern gewährleisten auch die notwendige Flexibilität, um Prozesse umzugestalten. Optische Technologien …
Der Aufbau des Systems
Das IPS ist speziell für die räumlich-zeitliche Echtzeit-Eigenverortung und 3D-Kartierung in Indoor- und Outdoor-Umgebungen geschaffen. Im Vordergrund stehen dabei Flexibilität und Autonomie: Für diese Aufgaben werden weder a-priori Wissen über die Umgebung (z.B. Karten), noch externe Referenzierungssysteme (z.B. GNSS) benötigt.
Zur Validierung bestehender Algorithmen und der Entwicklung neuer Ansätze kann das IPS vollständig in der dazugehörigen Simulation synthetisiert werden (Digital Twin). Industrielle Prozesse lassen sich so realitätsnah bewerten und damit verbundene hohe technische, logistische oder ökonomische Aufwendungen vermeiden.
Anwendungen
Die besondere Datenerfassung des IPS‘ erlaubt komplexe optische Analysen industrieller Prozesse. Zum einen können Maschinen auf diese Weise auf Abweichungen vom Normverhalten überwacht, durch Verortung identifiziert und so Unfälle frühzeitig verhindert werden. Neben dieser stetigen Kontrolle wird das IPS derzeit auch für visuelle Inspektions- und Wartungsaufgaben von industriellen Anlagen eingesetzt. Zum anderen findet die Echtzeit-3D-Kartierung als präzise und unabhängige Informationsquelle Anwendung bei der Navigation von autonomen Einheiten.

Auf Fahrzeug montiertes IPS

Handgetragenes IPS mit Thermal-Sensor
Ansprechpartner:
Maik Wischow
Dr.-Ing. Anko Börner
Institut:
SwarmRail
Die Idee dahinter
Wie kann der deckennahe Raum in einer Werkhalle optimal durch einen Roboter genutzt werden? SwarmRail ermöglicht Robotern, sich an der Decke in unterschiedliche Richtungen fortzubewegen, während sie gleichzeitig am Werktisch oder am Boden vielfältige Aufgaben durchführen.
Der Aufbau des Systems
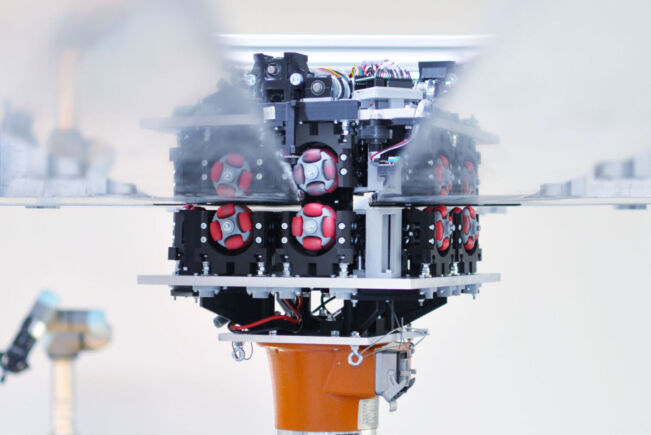
Die Besonderheit des SwarmRail-Systems liegt in der Kombination von omnidirektional mobilen Einheiten mit einem gitterförmigen Schienennetzwerk, welches durch passive Kreuzungen und einen durchgehenden Spalt zwischen den Laufflächen der Schienen gekennzeichnet ist. Durch diesen Spalt kann ein unterhalb der Schiene agierender Manipulator mit einer auf der Schiene verfahrenden mobilen Einheit verbunden werden.
Anwendungen
Durch den einfachen Aufbau des Schienennetzes und den gleichzeitigen Einsatz mehrerer mobiler Einheiten bietet das System eine innovative Lösung mit hohem wirtschaftlichem Potential für die Industrie, die Logistik und auch das Vertical Farming. Experimente an einem ersten funktionalen Demonstrator bestätigen die praktische Umsetzbarkeit des Konzepts.
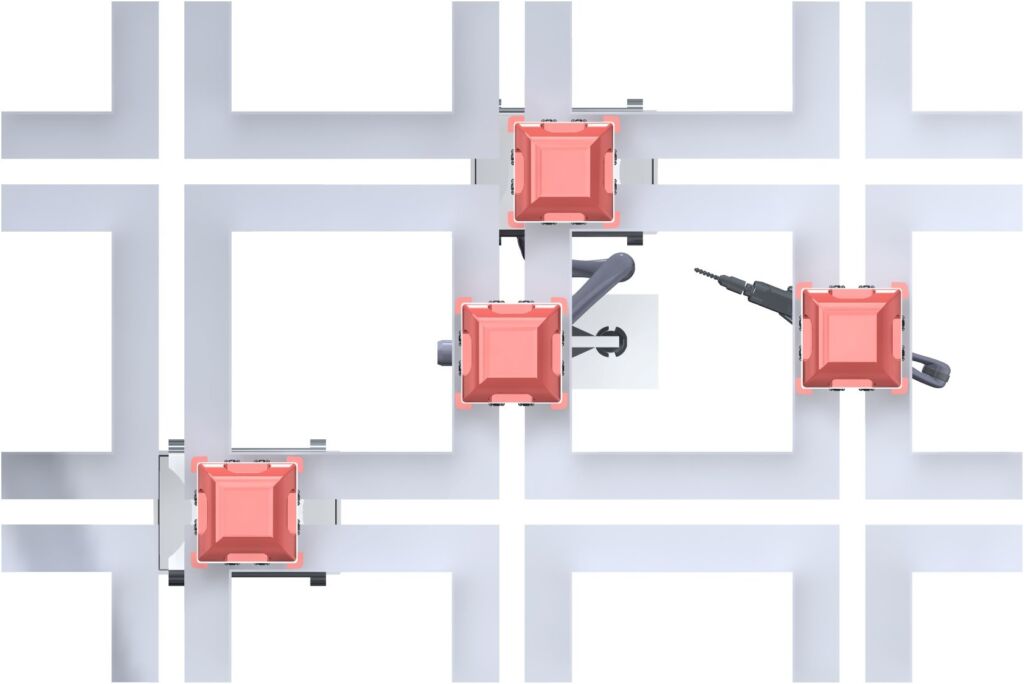
Visualisierung des SwarmRail-Konzepts mit mobilen Einheiten, die in einer Schienengitterstruktur fahren

SwarmRail-Unit mit Leichtbauroboter als Manipulator
Ansprechpartner:
Martin Görner