
Intuitive Programmierung mit semantischen Roboterfähigkeiten
Motivation
Der Trend zu individuell konfigurierbaren Produkten führt zu kleiner werdenden Stückzahlen. Dies macht eine Automatisierung häufig nicht rentabel, da sie den Einsatz von Experten verlangt. Unser Ziel ist es daher, die Programmierung von Robotern so weit zu vereinfachen, dass sie auch von Werkern durchgeführt werden kann. Die Idee hierbei ist, dass Experten für Roboter Fähigkeiten wie etwa Stecken oder Schrauben programmieren, die vom Endanwender lediglich ausgewählt und parametrisiert werden müssen.
Umsetzung
Die robotischen Fähigkeiten werden mit der von DLR RMC entwickelten visuellen Programmiersprache RAFCON in Form von hierarchischen Zustandsmaschinen umgesetzt. Damit können auch komplexe Abläufe mit Datenflüssen von Experten modelliert werden. Diese Skills werden semantisch annotiert, um diese vom System einlesen und analysieren zu können.
Anwendungen
Aktuell sind die Skills Pick, Place, Stack, Peg in Hole, Push und Hand over implementiert. Im Demonstrator lassen sich damit Boxen aufeinanderstapeln, Ringe auf einen Stift auffädeln, Knöpfe bedienen und Teile übergeben. Der Anwender kann wählen, ob er die Aufgaben lieber am Tablet eingibt oder am Roboter vormacht.
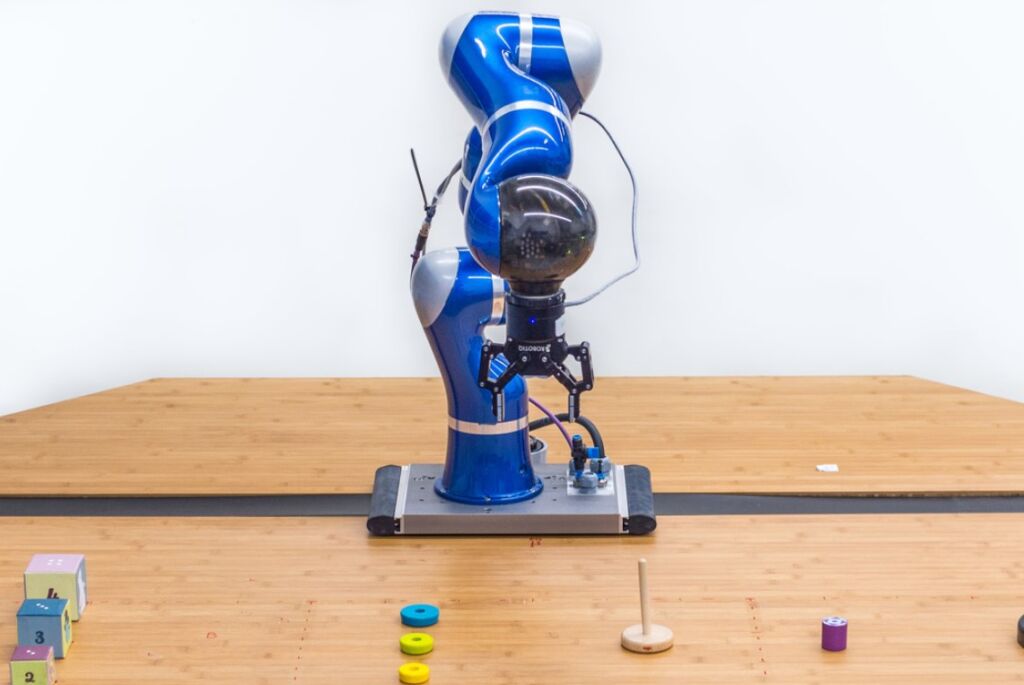
Der Roboterarm ist auf einer Linearachse montiert. Im Vordergrund liegen die Objekte, die sich manipulieren lassen.
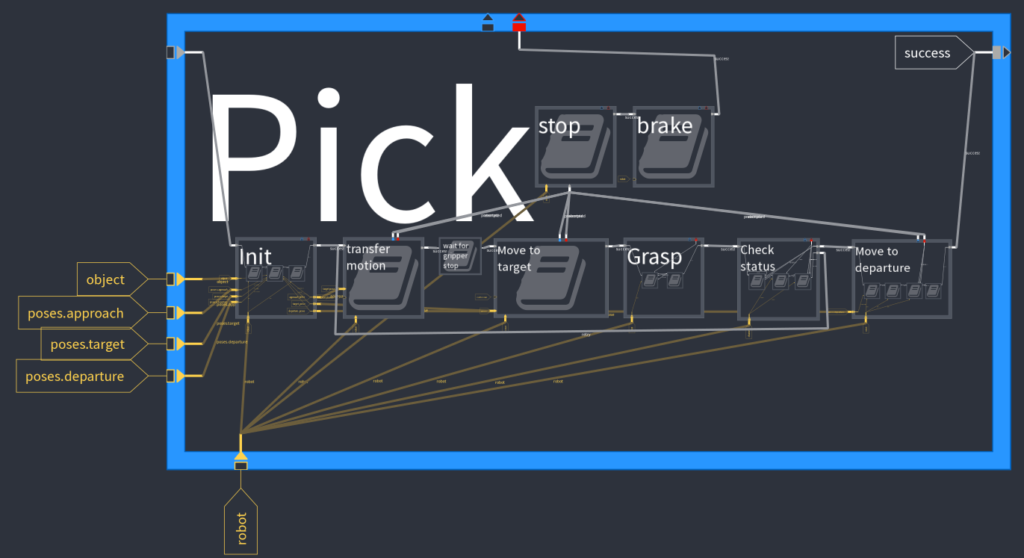
Die Roboterfähigkeit ‚Pick‘ von einem Experten in RAFCON programmiert
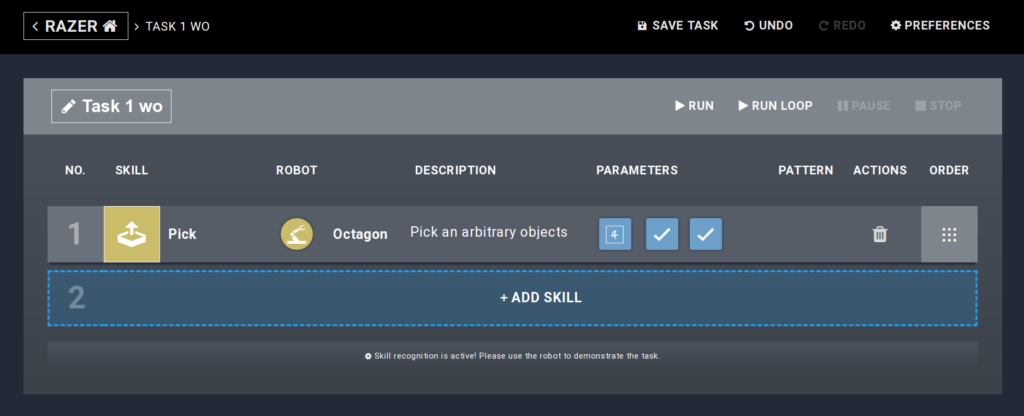
Die Bedienoberfläche für Endanwender. Im Ablaufplan wurde ein Pick-Skill eingefügt.
Ansprechpartner:
Franz Steinmetz
Institut:
Safe Autonomous Robotics Assistant
Die Idee dahinter
Robotische Fertigungsassistenten müssen gefühlvoll, flexibel und einfach zu bedienen sein – und mehr. Der DLR Safe Autonomous Robotic Assistant (SARA) soll die robotische Montageunterstützung auf ein neues Level heben.
Aufbau des Systems
Eine komplett neue, patentierte Anordnung von Kraft- und Drehmomentsensoren erlaubt die Unterscheidung von Führ- und Kontaktkräften. Per PCI Express kann der Steuerungs PC jederzeit bis in die Spitze des Roboters zugreifen.
Anwendungen
Im Rahmen der Factory of the Future ist SARA die zentrale Komponente für vollständig autonome Montage. Einfache Logistiksysteme und durchdachte passive Elemente reichen, um vollständig autonom für Montageaufträge zu rüsten, und diese abzuarbeiten. Durch die besonderen Fähigkeiten des Arms, zusammen mit der intelligenten Planungssoftware des Instituts für Robotik, werden komplexe Montageaufgaben oder kleine Losgrößen automatisierbar.

Roboterarm SARA beim Montageprozess einer Gehäuseabdeckung.
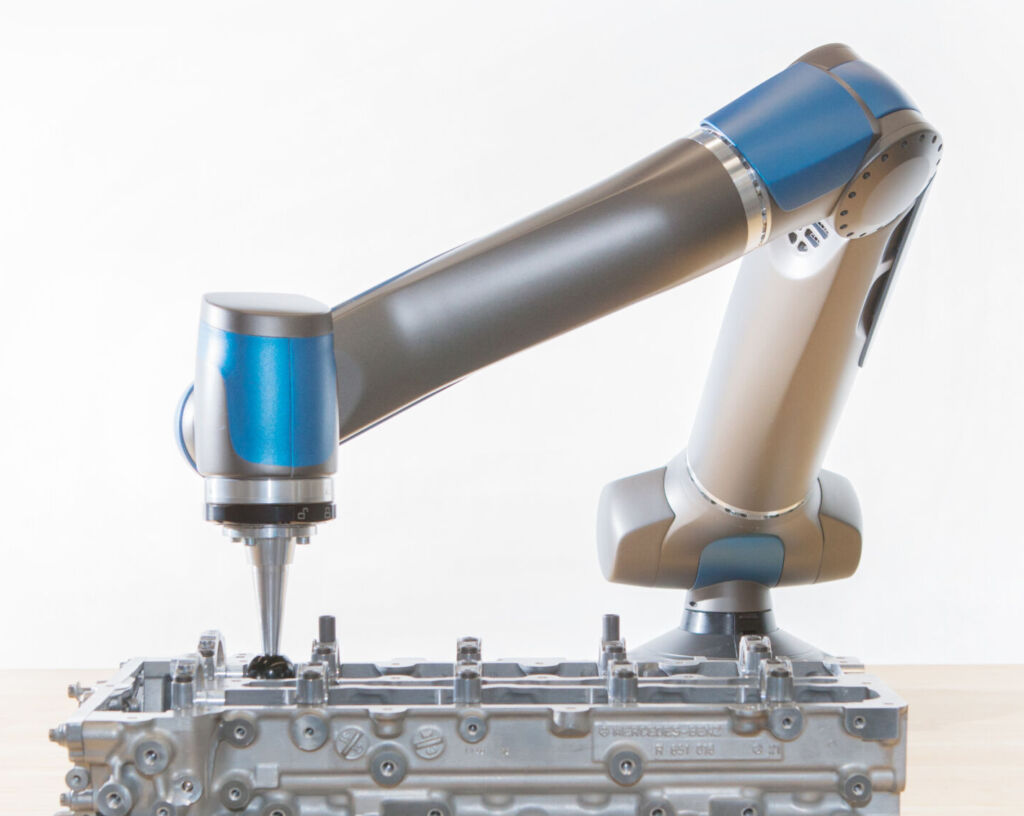
Safe Autonomous Robotic Assistent (SARA) mit Motorblock.
Ansprechpartner:
Oliver Eiberger
Institut:
ELISE
Die Idee dahinter
In der Qualitätssicherung und Instandhaltung sind viele Maschinenkomponenten nur schwer zugänglich. Besonders Bauteile in denen endoskopische Inspektionen nötig sind, werden noch hochgradig manuell ausgeführt. Daher soll mit der Entwicklung des endoskopischen Inspektionsroboters ELISE der Automatisierungsgrad in der Datenakquise für Inspektionen erhöht werden.
Aufbau des Systems
Kern der Entwicklung ist ein endoskopischer Roboter mit fünf Freiheitsgraden. Dieser ist aufgeteilt in einen beweglichen endoskopischen Schaft und eine Steuerungsbox. Zur vollständigen Bewegungsfähigkeit des Endoskops ist ELISE an ein bewegliches Trägersystem gebunden, wie zum Beispiel einen Cobot. In Kombination mit dem Trägersystem bewegt sich ELISE an endoskopische Wartungsports heran und dringt so in Hohlräume hinein. Durch die Integration von mechatronischen Gelenken können komplexe Trajektorien innerhalb dieser beengten Räume abgefahren werden. Zusätzlich können auch generell schwer zugängliche Maschinenkomponenten erreicht werden, die nicht endoskopischer Natur sind.
Anwendungen
Hauptaufgabenfeld für ELISE ist die digitale endoskopische Inspektion von Maschinenkomponenten, Tanks oder Infrastrukturen. Dabei werden im speziellen wiederholbare und standardisierte Aufnahmebedingungen für optische Prüfungen und automatisierte Datenakquise erzeugt. Diese Datenakquise erleichtert die Suche nach Defekten für das Prüfpersonal, da sie nicht im mehr in nicht-ergonomischen Arbeitsbedingungen prüfen und zertifizieren müssen. Vielmehr kann die Inspektion nun auch remote und teleoperiert erfolgen. Durch wiederholbare Inspektion wird zudem die Datengrundlage für zukünftige lernende Algorithmen zur automatischen Befundung geschaffen.
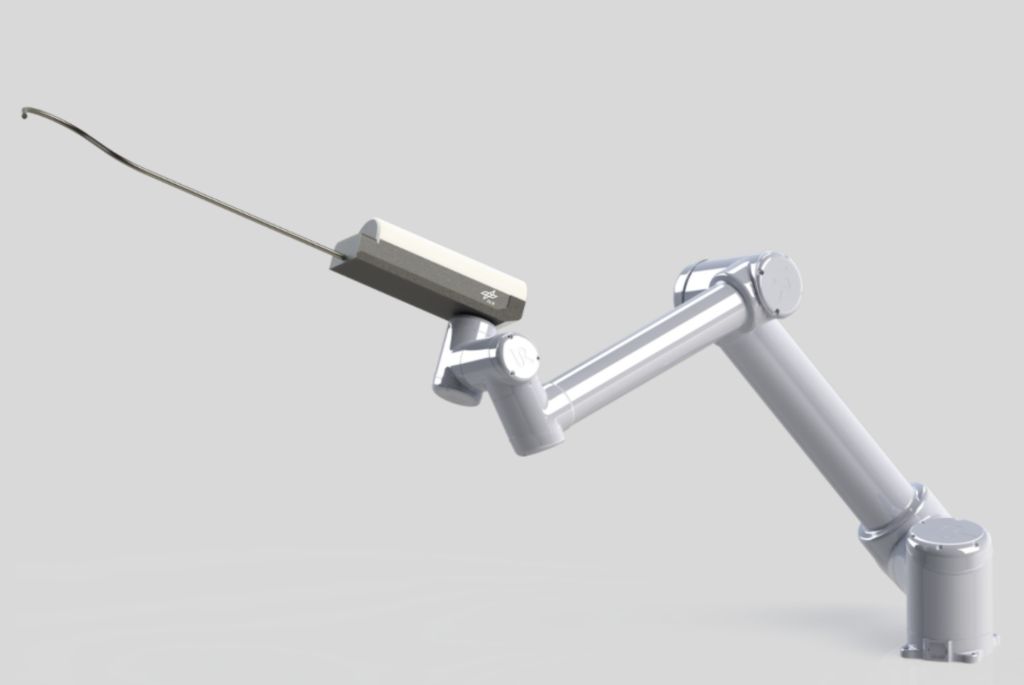
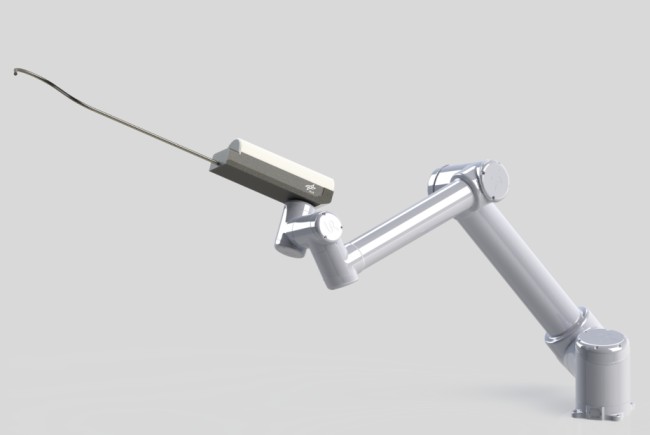
Visualisierung des endoskopischen Inspektionsroboters ELISE in Kombination mit einem Cobot.
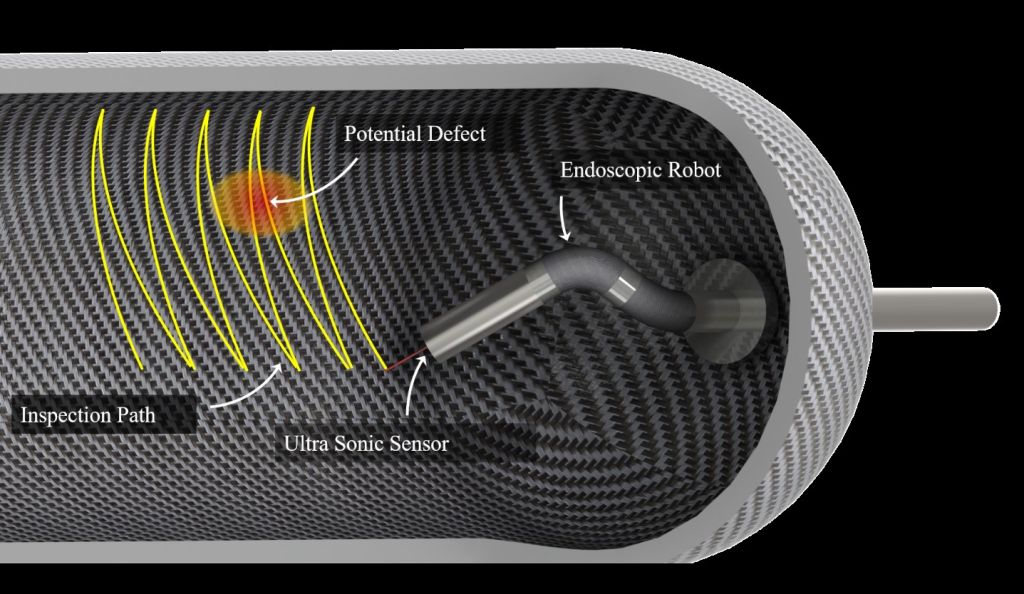
Inspektionsszenario von CFK-Tanks.
Ansprechpartner:
Florian Heilemann